ROS2笔记(一)URDF 描述文件
为什么没有先写ROS2 的安装笔记,而是写URDF?因为URDF 文件描述这一块儿并不是那么容易去检索,所以赶紧记下来,怕再想不起来就又拖好久。
文件基本结构
URDF 文件就是一个特殊的XML 文件,其操作的对象是坐标系,结构大体如下:
xml
<?xml version="1.0"?>
<!-- 定义一个叫robot_name 的机器人 -->
<robot name="robot_name">
<!-- 定义蓝色材料 -->
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<!-- 定义一个基准link(连杆) -->
<link name="base_link">
<visual>
<!-- 该连杆的几何参数 -->
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<!-- 相对于父坐标的偏移和旋转 -->
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="blue"/>
</visual>
</link>
<!-- 下一个连杆 -->
<link name="first_link">
</link>
<!-- 定义一个关节连接两个连杆(child 一般要跟随parent 动作) -->
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="first_link"/>
</joint>
</robot>连杆参数
一般连杆有以下几个关键参数:
位置信息origin:
- 主要包含该物体相对于父坐标系的平移和旋转
几何特征geometry 有下面几种类型:
- cylinder:圆柱,比较常用
- box:长方体
- mesh:任意网格,一般通过
filename参数指定<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae" />
除几何特征以外,连杆还有一个碰撞检测的属性collision:
xml
<collision>
<geometry>...</geometry>
</collision>关节参数
URDF 文件中角度的单位是弧度哦。
xml
<!-- 定义关节名和关节类型 -->
<joint name="joint6output_to_joint6" type="revolute">
<!-- 定义旋转轴(z) -->
<axis xyz="0 0 1"/>
<!-- 力矩/角度/速度限制 -->
<limit effort = "1000.0" lower = "-3.14159" upper = "3.14159" velocity = "0"/>
<parent link="joint6"/>
<child link="joint6_flange"/>
<!-- 关节坐标系定义 -->
<origin xyz= "0 0.0456 0" rpy = "-1.5708 0 0"/>
</joint>常用关节类型:
- fixed 固定关节
- revolute 旋转关节
- prismatic 平移关节
定义一个R-R-P 三关节机械臂
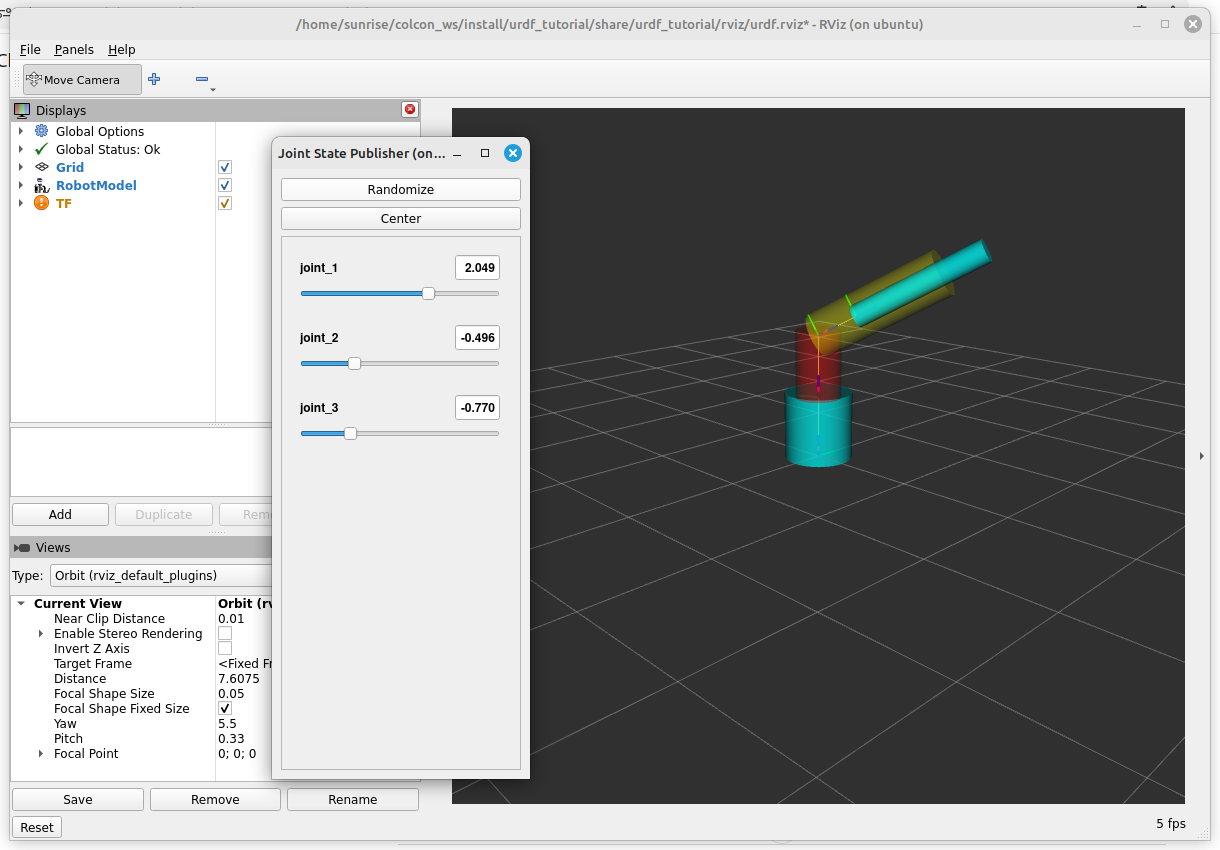 通过下面代码,可以定义一个如上图的机械臂:
通过下面代码,可以定义一个如上图的机械臂:
urdf代码
xml
<?xml version="1.0"?>
<robot name="myfirst">
<material name="base">
<color rgba="0 0.9 0.9 1.0"/>
</material>
<link name="base_link">
<visual>
<!-- 1. 现将坐标轴沿z 轴平移0.1 -->
<origin xyz="0.0 0.0 0.3" rpy="0.0 0.0 0.0"/>
<geometry>
<!-- 2. 基于坐标轴原点创建一个圆柱体,上下厚各0.3 -->
<cylinder radius="0.3" length="0.6"/>
</geometry>
<!-- 3. 添加材料 -->
<material name="base" />
</visual>
</link>
<!-- 7. 第一个旋转连杆 -->
<link name="first_r">
<visual >
<origin xyz="0.0 0.0 0.3" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.2" length="0.6"/>
</geometry>
<material name="">
<color rgba="1.0 0.0 0.0 .5"/>
</material>
</visual>
</link>
<link name="second_r">
<visual >
<origin xyz="0.0 0.0 0.6" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.2" length="1.2"/>
</geometry>
<material name="">
<color rgba="1.0 1.0 0.0 .5"/>
</material>
</visual>
</link>
<link name="first_p">
<visual name="">
<origin xyz="0.0 0.0 0.6" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.1" length="1.2"/>
</geometry>
<material name="">
<color rgba="0.0 1.0 1.0 1.0"/>
</material>
</visual>
</link>
<joint name="joint_1" type="revolute">
<!-- 4. 定义关节坐标系位置(似乎必须要重合一部分) -->
<origin xyz="0.0 0.0 0.55"/>
<!-- 5. 设置旋转轴 -->
<axis xyz="0.0 0.0 1.0"/>
<!-- 6. 设置边界条件 -->
<limit lower="0" upper="3.14" effort="100.0" velocity="0.0"/>
<parent link="base_link"/>
<child link="first_r"/>
</joint>
<joint name="joint_2" type="revolute">
<origin xyz="0.0 0.0 0.55" rpy="1.57 0.0 0.0"/>
<axis xyz="1.0 0.0 0.0"/>
<limit lower="-1" upper="1" effort="100.0" velocity="0.0"/>
<parent link="first_r"/>
<child link="second_r"/>
</joint>
<joint name="joint_3" type="prismatic">
<origin xyz="0.0 0.0 1.15"/>
<axis xyz="0.0 0.0 1.0"/>
<limit lower="-1" upper="0" effort="0.0" velocity="0.0"/>
<parent link="second_r"/>
<child link="first_p"/>
</joint>
</robot>常见问题
- 关节的
origin偏移量要略小与上一个连杆的长度,否则就会渲染不出来 - 建模步骤可以参考ROS筆記 - 機器人模型URDF ,自上而下、不易出错
- 实际工作中,也可通过CAD 工具软件,将三维直接导出为URDF 文件