Docker 基本操作
在软件开发完成,进入实际部署的时候,可能会遇到各种环境不兼容的问题,优势也许要将代码的运行环境与其他项目隔离,这时就需要用到容器技术,可以在不同平台上快速构建相同的开发/运行环境。
Docker 是最流行的一个容器引擎,除此之外还有Podman。因为VSCode 使用docker 作为DevContainer 的实现,所以本文将以DevContainer + ROS2 为示例,记录相关操作。
Docker Community Edition
下面是Docker CE 的安装步骤,因为本人使用的是LMDE,因此需要安装Debian 的教程通过脚本安装:
# 1. 移除现有的安装
sudo apt remove $(dpkg --get-selections docker.io docker-compose docker-doc podman-docker containerd runc | cut -f1)
# 2. 通过脚本安装Docker
curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh ./get-docker.sh在Debian 环境下,安装docker 之后,还需要将用户添加到docker 用户组,否则每次执行docker 命令时,需要使用sudo 权限。
# 添加用户到docker 组
sudo usermod -aG docker your_account基本指令
以下是docker 的一些常用指令,足够满足一般使用场景:
镜像管理
docker images # 列出所有docker 镜像,包含ID 和名字
docker rmi IMAGE_ID/IMAGE_NAME # 移除镜像
# 加载离线镜像(断网环境下比较好用)
docer load -i image.tar容器管理
docker ps -a # 列出全部容器,去掉-a 标识则仅列出在运行容器
docker rm ID/NAME # 移除容器(需要先停止)
# 通过镜像创建容器并运行
docker run -it --entrypoint /bin/bash \ # 指定入口
--name ocr_docker_0_4 \ # 指定容器名
-v ~/ocr_docker:/home/ocr_docker \ # 挂载卷
-w /home/ocr_docker \ # 指定当前工作区
-p 80:8889 \ # 端口映射
ocr-docker:0.4 \ # 镜像名
-c "python3 main.py" # 执行命令
docker start/stop/restart ID/NAME # 启动/重启/停止容器通过docker start 启动容器时,无需像docker run 一样传入各种参数,因为容器已经记住了所需的参数。
保存变更
# 保存变更到新镜像(不影响原镜像) #
docker commit container_ID image_name #
# 导出镜像到tar 文件 #
docker save image_name -o filename.tar #
# 加载离线镜像
docer load -i image.tarDockerfile
Dockerfile 是一个文本文件,包含了构建 Docker 镜像的所有指令。主要包含以下内容:
# 指定基础镜像,用于后续的指令构建。
FROM ros:humble
# 获取构建参数,可以通过docker build 传入
ARG USERNAME=USERNAME
# 在构建过程中在镜像中执行命令。
RUN apt-get update && apt-get upgrade -y
# 在容器内部设置环境变量。
ENV SHELL /bin/bash
# 指定后续指令的用户上下文
USER $USERNAME
# 指定容器创建时的默认命令。(可以被覆盖)
CMD ["/bin/bash"]通过当前目录下的Dockerfile 构建镜像:
docker build -t image_name:version .Docker Compose
Docker Compose 可以通过一个配置文件定义、启动和管理一组相互关联的容器服务。上面创建容器的命令可以写作compose.yaml:
# Docker Compose 配置文件
services:
ocr: # 定义一个名为 "ocr" 的服务
image: ocr-docker:0.4 # 指定使用的 Docker 镜像名称和版本标签
container_name: ocr_docker_0_4 # 设置容器的自定义名称,方便识别和管理
volumes: # 数据卷映射配置
- ~/ocr_docker:/home/ocr_docker
working_dir: /home/ocr_docker # 设置容器的工作目录
ports: # 端口映射配置
- "80:8889"
restart: unless-stopped # 容器退出后自动重启
# 无需交互模式
# 使用 command 指定启动命令(推荐)
command: python3 main.py
# 如果需要交互模式则启用下面三行
# entrypoint: /bin/bash
# stdin_open: true
# tty: true相关命令如下,Docker Compose 会在当前工作目录查找配置文件,因而无需显式传值:
docker compose up # 启动服务,前台运行。设置`-d` 设置后台运行
docker compose start/restart/stop
docker compose down # 停止并删除容器。设置`-v` 会同时删除数据卷
docker compose ps也可以在不同目录启动多个 Docker Compose 项目,它们互不干扰。
Dev Container
DevContainer 是一种Docker 容器,VSCode 可以直连进行开发工作,非常方便。DevContainer 会自己处理构建镜像、启动容器的工作。
标准环境建立
如果是自己新建项目,一步步进行开发工作,可以从头建立自己的DevContainer 容器,过程如下:
- 安装打开VSCode,点击左下角远程连接的按钮;
- 选择
New Dev Container;- 选择预定义模板,以
Ubuntu为例;- 选择额外选项(可选):
- 版本号:
jammy- 特性:
Git:保持默认配置- 完成(等待一段时间拉取镜像)。
得到项目结构如下图所示: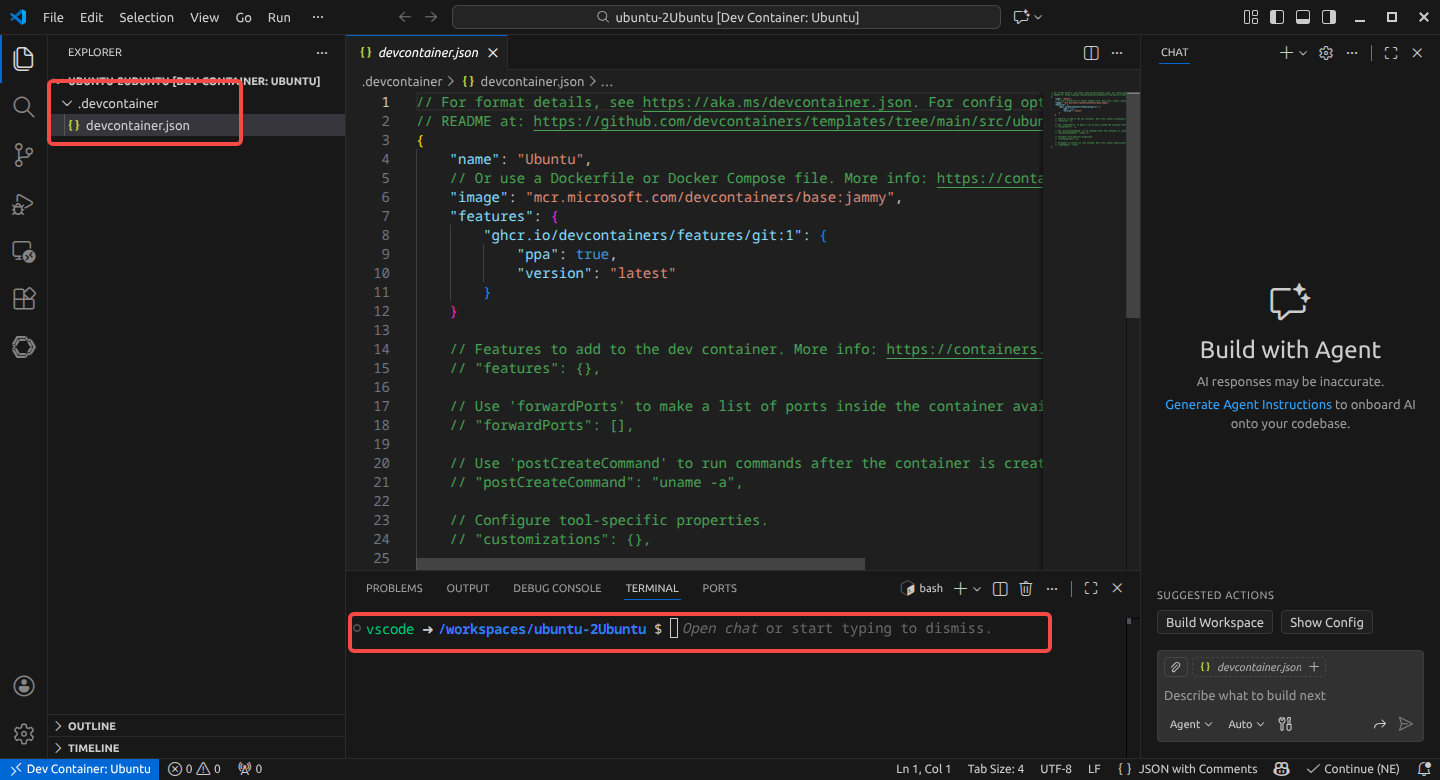
其中,配置文件.devcontainer/devcontainer.json 内容如下:
{
"name": "Ubuntu",
// 镜像可以用链接,也可以用Dockerfile 等
// More info: https://containers.dev/guide/dockerfile
"image": "mcr.microsoft.com/devcontainers/base:jammy",
"features": { // 启用git 特性
"ghcr.io/devcontainers/features/git:1": {
"ppa": true,
"version": "latest"
}
}
// ...
}一般环境发布
如果要发布DevContainer 的配置,让用户可以直接使用,则需要编写更加复杂的配置文件。以ROS2 的项目文件为例,其文件结构如下:
ros_ws
├── .devcontainer # devcontainer 配置相关
│ ├── devcontainer.json
│ └── Dockerfile # 容器配置相关
├── src # 项目代码
├── package1
└── package2{
"name": "ROS 2 Development Container", // 开发容器的名称,显示用
"privileged": true, // 以 --privileged 模式运行容器,可以访问宿主即设备、网络等
"remoteUser": "doumiao2", // VS Code 连接容器后使用的默认用户,一般与当前用户相同,这样不会出现权限问题
"build": { // 构建相关
"dockerfile": "Dockerfile", // Dockerfile 的路径
"args": {
"USERNAME": "doumiao2" // Dockerfile 会读取当前属性值`ARG USERNAME`
}
},
"workspaceFolder": "/home/ros_ws", // 工作区文件夹(宿主机)
// 挂载工作区文件夹到容器(指定目录)
"workspaceMount": "source=${localWorkspaceFolder},target=/home/ros_ws,type=bind",
// VSCode 定制属性
"customizations": {
"vscode": {
"extensions":[ // 自动安装下面插件
"ms-vscode.cpptools",
"ms-vscode.cpptools-themes",
"twxs.cmake",
"donjayamanne.python-extension-pack",
"eamodio.gitlens",
"ms-iot.vscode-ros"
]
}
},
"containerEnv": { // 容器环境
"DISPLAY": "unix:0", // X11 GUI 转发
"ROS_LOCALHOST_ONLY": "1", // DDS 通信仅限于本机
"ROS_DOMAIN_ID": "42" // DDS 域隔离
},
// 运行参数,传递给docker run 的参数
"runArgs": [
"--net=host", // 容器与宿主共享网络命名空间
"--pid=host", // 共享进程命名空间
"--ipc=host", // 共享 IPC(Gazebo、FastDDS 更稳定)
"-e", "DISPLAY=${env:DISPLAY}" // 从宿主机继承 DISPLAY 值,用于X11 转发
],
"mounts": [ // 额外的挂载
// X11 套接字,GUI 程序显示到宿主
"source=/tmp/.X11-unix,target=/tmp/.X11-unix,type=bind,consistency=cached",
// GPU / 显卡直通,RViz、Gazebo、OpenGL 加速
"source=/dev/dri,target=/dev/dri,type=bind,consistency=cached"
],
// 容器首次创建完成后执行的命令:更新依赖数据库、安装依赖、修复挂载目录权限问题
"postCreateCommand": "sudo rosdep update && sudo rosdep install --from-paths src --ignore-src -y && sudo chown -R $(whoami) /home/ros_ws/"
}# 继承镜像ros:humble
FROM ros:humble
# 获取构建参数:用户名、用户ID、用户组ID
ARG USERNAME=USERNAME
ARG USER_UID=1000
ARG USER_GID=$USER_UID
# 如果用户存在则删除
RUN if id -u $USER_UID ; then userdel `id -un $USER_UID` ; fi
# 创建用户
RUN groupadd --gid $USER_GID $USERNAME \
&& useradd --uid $USER_UID --gid $USER_GID -m $USERNAME \
# 安装sudo 并授权
&& apt-get update \
&& apt-get install -y sudo \
&& echo $USERNAME ALL=\(root\) NOPASSWD:ALL > /etc/sudoers.d/$USERNAME \
&& chmod 0440 /etc/sudoers.d/$USERNAME
# 更新系统
RUN apt-get update && apt-get upgrade -y
# 安装python 依赖
RUN apt-get install -y python3-pip
# 设置默认shell
ENV SHELL /bin/bash
# 默认用户切换
USER $USERNAME
# 默认启动命令
CMD ["/bin/bash"]如果配置文件有更新,则需Ctrl+Shift+P,选择Dev Container: Rebuild 一下。至于移除,则参考移除Docker 容器/镜像即可。